
Some Linux distros really suck at dealing with multiple hard drives. Too many “maintainers” only have a laptop. Background You need a wee bit of background before we jump in. Hopefully you can see the featured image. Recently picked up this Lenovo M93p ThinkCentre from eBay. I specifically bought an M93p instead of M83 because I wanted two hard drives. I had a 480 GB SSD I wanted to transfer the Windows 10 over to … Linux Distros That Suck at Multiple Hard DrivesRead more
serial port
Posted inInformation Technology / Raspberry Pi
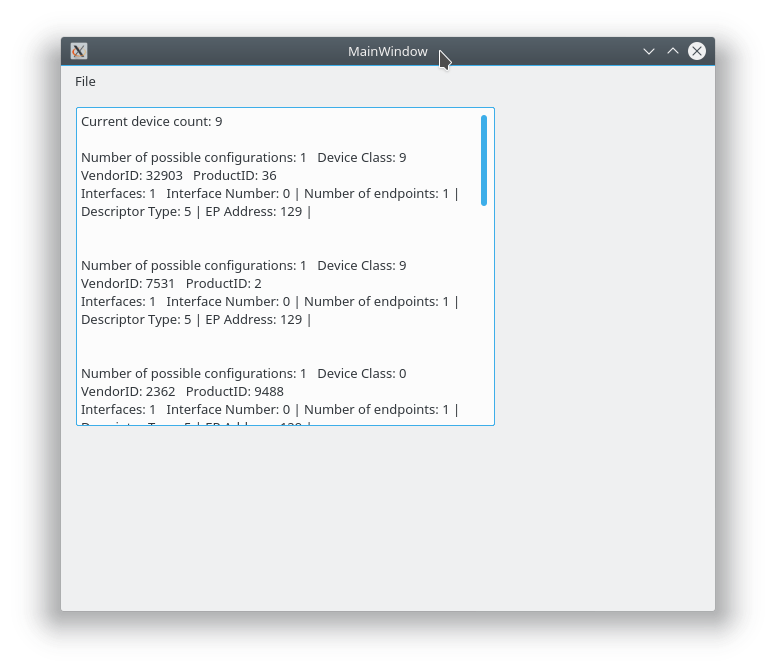
Qt and USB – Pt. 1
Recently I’ve had some discussions on the qt-interest mailing list about Qt and USB and why it is not integrated in the package. Many of the kids there aren’t old enough to shave so they don’t remember this _exact_ same journey with serial ports. Couldn’t be done in a cross platform blah blah blah. Then there were various “unofficial” Qt based serial port classes. Then we had “almost” official stuff showing up in the Qt … Qt and USB – Pt. 1Read more
Posted inRaspberry Pi
Raspberry Qt – Part 9
Making the serial port actually work By default your Pi has a getty/mgetty process enabled. There are many out of date instructions about disabling it. Please pay attention to the date of the post when looking for advice. The Pi world is fast changing. While those instructions were good at one time they are invalid now just as these instructions may well be invalidated in the future. Open a terminal window and type sudo raspi-config … Raspberry Qt – Part 9Read more
Posted inRaspberry Pi
Raspberry Qt – Part 7
Finding the serial port There is one chunk of the code we really do need to discuss and that is the snippet of how the application chooses its serial port beginning around line 48 in serialthread.cpp. I even put a comment in the code to explain why it looks the way it does. // One cannot be certain about order if more than one serial port is on the system. // My HP … Raspberry Qt – Part 7Read more